Skid: A Low-Cost Wheeled Robot
Skid is a low-cost mobile manipulator that I use as a research platform. It consists of a skid-steer wheeled base that comfortably operates at speeds between 1 and 2 m/s, a 6DoF robot arm, and ample place to mount sensors and compute. Currently, I have it configured with the following:
- A Jetson Orin Nano Super 8gb
- Intel Realsense T265
- Orbbec Astra Pro
- LDROBOT LD19 Lidar (2D, 10Hz)
- Arducam Wrist camera, mounted to the arm's end affector
- Agilex PiPER 6DoF Arm (1.5kg payload, 700mm reach)

It adheres to the following design constraints. It can:
- Operate indoors and outdoors in sunny weather.
- Operate comfortably at 1 - 2 m/s.
- Support an additional weight of up to 50kg.
- Cost under $1500, not including sensors or the arm.
Skid's base costed me $1200, plus $3000 for the arm, $250 for the Jetson, and $300 for sensors. I bought most of these parts under Trump's Tariffs, so prices for certain components were inflated by 10-30%. The most expensive components were as follows:
- REV Neo motors/gearboxes - $150 x 2
- Flipsky ESCs - $100 x 2
- 6S 1300 mAh LiPo Battery - $130
- HOTA D6 battery charger - $125
Alternatives
I built Skid as a research platform for other projects. Before I started on Skid, though, I did some research on what was commercially available, and everything I found was too expensive:
- Clearpath Jackal ($10k - 15k): A maximum payload capacity of 20 kgs.
- Clearpath Husky (A lot): Too big for easy operation inside a home.
- AgileX Ranger Mini: $10k - 12k: Its holonomic drivetrain is nice.
- Rover Robotics MITI: $7.5k: It comes with a nice charging dock.
- Rover Robotics mini: $3.3k: Too small to mount many sensors.
- TidyBot++: $5k: The best option - an open-source holonomic mobile manipulator. Unfortunately, still too expensive.
Because of my cost and operational domain constraints ($1500, inside/outside), I opted against a holonomic drivetrain. Inspired by TidyBot, I looked for parts from FRC suppliers and designed a skid-steer robot that met my needs.
Design
Skid's body is built out of REV MAXTubes joined by laser-cut 1/4" MDF brackets. The wheels take up the left and right side of the robot, while the center of the robot holds electronics, including the ESCs. The wheels are Harbor Freight's 10in pneumatic tires that attach to an adapter I designed for 1/2in hex axles. The left and right side of the robot are driven independently through chain by two REV Neo V1.1 motors with 2.6 Nm stall torque. The top of the robot is a flat surface that can be used to mount sensors, among other things.
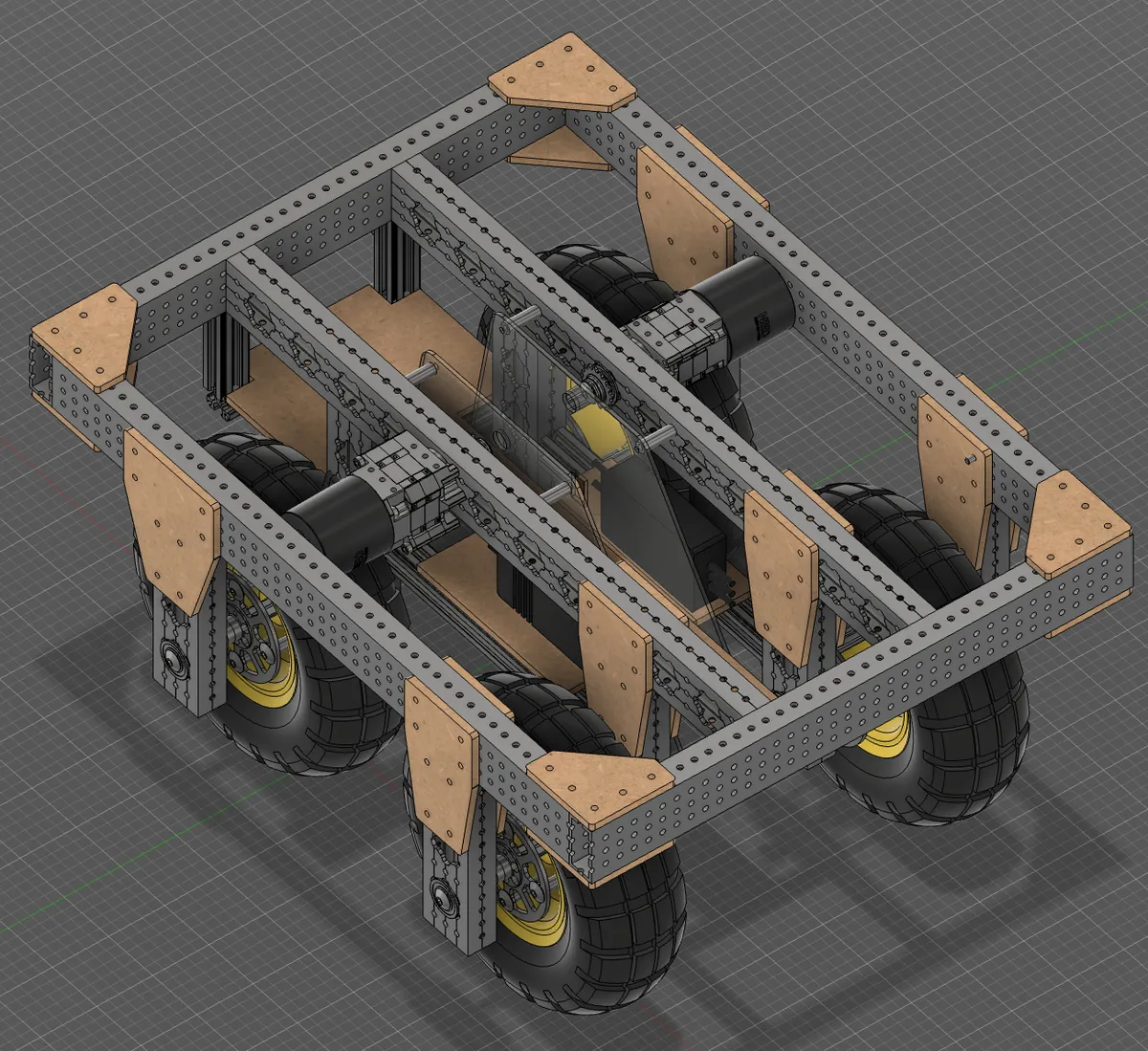
The most significant challenge I encountered while building this design was the fact that my original adapter design blocked access to the Schrader valve used to fill air in the tires, so I used brass L-shaped Schrader extensions to make the valve accessible.